
Industrial Robotics
VSW-S3160
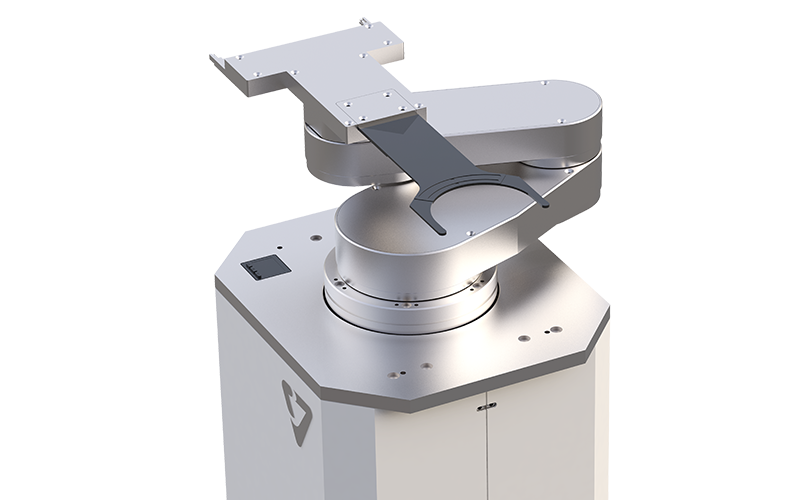
Cleanroom-Compatible VSW Series
Uses an absolute servo motor, offering high precision and reliability.
Applies various types of grippers, making it suitable for work transfer in different environments.
Features
Enables fast and safe wafer handling with precise operation and optimized motion.
Selectable base type or flange type depending on the installation environment of the equipment.
Provides high reliability and maintenance convenience.
Allows encoder battery replacement without opening the cover.
Intuitive teaching pendant UI configuration.



Robot
| Specification | Index WTR Single | Index WTR Double |
|---|---|---|
| Model | VSW-S3160-300-AV-M | VSW-D4160-300-AV-M |
| Handling Object | 8 inch Wafer (STD) | 12 inch Wafer (STD) |
| Grip Method | Vacuum grip (STD) | Vacuum grip (STD) |
| Min Rotate Dia. | Ø 450 mm | Ø 570 mm |
| Gripper Reach | 525 mm | 580 mm |
| Configuration of Axis | R / T / Z (3 Axis) | R1 / R2 / T / Z (4 Axis) |
| Coordinate System | Cylindrical | Cylindrical |
| Repeatability | Within ±0.1 mm | Within ±0.0.1 mm |
| Cleanliness | ISO Class 2 | ISO Class 2 |
| Axis | R Axis | T Axis | Z Axis |
|---|---|---|---|
| Stroke | 400 mm (Single) / 445 mm (Double) | 340° | 300 mm |
| Speed | 200°/s (1,117 mm/s) | 400°/s | 500 mm/s |
| Utility | Power Source | Vacuum Pressure | CDA Pressure |
| AC 200/230 V ±10% | ≤ –80 kPa | NA | |
| Others | Mapping | Mount Type | Weight |
| Included (thru-beam) | Bottom Mount | Approx. 32 kg |
Controller
| Model | VRC4400 |
|---|---|
| Interface | RS232C Ethernet and parallel photo I/O |
Features
 Reduces wafer handling time by using a dual arm
Reduces wafer handling time by using a dual arm Enables fast and safe wafer handling with precise operation and optimized motion
Enables fast and safe wafer handling with precise operation and optimized motion Selectable base type or flange type depending on the installation environment of the equipment
Selectable base type or flange type depending on the installation environment of the equipment Provides high reliability and maintenance convenience
Provides high reliability and maintenance convenience Allows encoder battery replacement without opening the cover
Allows encoder battery replacement without opening the cover Intuitive teaching pendant UI configuration
Intuitive teaching pendant UI configuration
VSW-D4160

Cleanroom-Compatible VSW Series
Uses an absolute servo motor, offering high precision and reliability.
Applies various types of grippers, making it suitable for work transfer in different environments.
Features
Enables fast and safe wafer handling with precise operation and optimized motion.
Selectable base type or flange type depending on the installation environment of the equipment.
Provides high reliability and maintenance convenience.
Allows encoder battery replacement without opening the cover.
Intuitive teaching pendant UI configuration.

Robot
| Specification | Index WTR Single | Index WTR Double |
|---|---|---|
| Model | VSW-S3160-300-AV-M | VSW-D4160-300-AV-M |
| Handling Object | 8 inch Wafer (STD) | 12 inch Wafer (STD) |
| Grip Method | Vacuum grip (STD) | Vacuum grip (STD) |
| Min Rotate Dia. | Ø 450 mm | Ø 570 mm |
| Gripper Reach | 525 mm | 580 mm |
| Configuration of Axis | R / T / Z (3 Axis) | R1 / R2 / T / Z (4 Axis) |
| Coordinate System | Cylindrical | Cylindrical |
| Repeatability | Within ±0.1 mm | Within ±0.1 mm |
| Cleanliness | ISO Class 2 | ISO Class 2 |
| Axis | R Axis | T Axis | Z Axis |
|---|---|---|---|
| Stroke | 400 mm (Single) / 445 mm (Double) | 340° | 300 mm |
| Speed | 200°/s (1,117 mm/s) | 400°/s | 500 mm/s |
| Utility | Power Source | Vacuum Pressure | CDA Pressure |
| AC 200/230 V ±10% | ≤ –80 kPa | NA | |
| Others | Mapping | Mount Type | Weight |
| Included (thru-beam) | Bottom Mount | Approx. 32 kg |
Controller
| Model | VRC4400 |
|---|---|
| Interface | RS232C Ethernet and parallel photo I/O |
Features
- Reduces wafer handling time by using a dual arm
- Enables fast and safe wafer handling with precise operation and optimized motion
- Selectable base type or flange type depending on the installation environment of the equipment
- Provides high reliability and maintenance convenience
- Allows encoder battery replacement without opening the cover
- Intuitive teaching pendant UI configuration